RS485-LB/LS -- Waterproof RS485/UART to LoRaWAN Converter

Table of Contents:
- 1. Introduction
- 2. Operation Mode
- 3. Configure RS485-LB/LS
- 3.1 Configure Methods
- 3.2 General Commands
- 3.3 Commands special design for RS485-LB/LS
- 3.3.1 Choose Device Type (RS485 or TTL)
- 3.3.2 RS485 Debug Command (AT+CFGDEV)
- 3.3.3 Set Payload version
- 3.3.4 Set RS485 Sampling Commands
- 3.3.5 Fast command to handle MODBUS device
- 3.3.6 RS485 command timeout
- 3.3.7 Uplink payload mode
- 3.3.8 Clear RS485 Command
- 3.3.9 Set Serial Communication Parameters
- 3.3.10 Cut data separation processing
- 3.3.11 Control output power duration
- 3.3.12 Encrypted payload
- 3.3.13 Get sensor value
- 3.3.14 Resets the downlink packet count
- 3.3.15 When the limit bytes are exceeded, upload in batches
- 3.3.16 Copy downlink to uplink
- 3.3.17 Query version number and frequency band
- 3.4 +3V3 Output
- 3.5 +5V Output
- 3.6 Switch Jumper
- 3.7 Connect to external temperature sensor & counting sensor(Since firmware V1.1.0)
- 3.8 Set time synchronization interval
- 3.9 Battery & Power Consumption
- 4. Case Study
- 5. OTA Firmware update
- 6. FAQ
- 6.1 How to change the LoRa Frequency Bands/Region?
- 6.2 How many RS485-Slave can RS485-LB/LS connects?
- 6.3 How to Use RS485-LB/LS to connect to RS232 devices?
- 6.4 How to judge whether there is a problem with the set COMMAND
- 6.5 Where to get the decoder for RS485-LB/LS?
- 6.6 How to connect RS485-LB node to UART distance sensor?
- 6.7 How to determine whether the returned data value FF is valid data or invalid data?
- 7. Trouble Shooting
- 7.1 Downlink doesn't work, how to solve it?
- 7.2 Why I can't join TTN V3 in US915 /AU915 bands?
- 7.3 Possible reasons why the device is unresponsive:
- 7.4 Why can't customers see the device's data in the server when the data is too long?
- 7.5 How to solve the problem that the sensor requires a pull-up resistor on the RS485A pin?
- 8. Order Info
- 9. Packing Info
- 10. Support
1. Introduction
1.1 What is RS485-LB/LS RS485/UART to LoRaWAN Converter
The Dragino RS485-LB/LS is a RS485 / UART to LoRaWAN Converter for Internet of Things solutions. User can connect RS485 or UART sensor to RS485-LB/LS converter, and configure RS485-LB/LS to periodically read sensor data and upload via LoRaWAN network to IoT server.
RS485-LB/LS can interface to RS485 sensor, 3.3v/5v UART sensor or interrupt sensor. RS485-LB/LS provides a 3.3v output and a 5v output to power external sensors. Both output voltages are controllable to minimize the total system power consumption.
RS485-LB/LS is IP67 waterproof and powered by 8500mAh Li-SOCI2 battery or solar powered + Li-ion battery, it is designed for long term use for several years.
RS485-LB/LS runs standard LoRaWAN 1.0.3 in Class A. It can reach long transfer range and easy to integrate with LoRaWAN compatible gateway and IoT server.
For data uplink, RS485-LB/LS sends user-defined commands to RS485 devices and gets the return from the RS485 devices. RS485-LB/LS will process these returns data according to user-define rules to get the final payload and upload to LoRaWAN server.
For data downlink, RS485-LB/LS runs in LoRaWAN Class A. When there is downlink commands from LoRaWAN server, RS485-LB/LS will forward the commands from LoRaWAN server to RS485 devices.
RS485-LB/LS Supports BLE configure and wireless OTA update which make user easy to use.
Each RS485-LB/LS pre-load with a set of unique keys for LoRaWAN registration, register these keys to LoRaWAN server and it will auto connect after power on.
1.2 Specifications
Common DC Characteristics:
- Supply Voltage: Built-in Battery , 2.5v ~ 3.6v
- Operating Temperature: -40 ~ 85°C
I/O Interface:
- Battery controllable output (2.6v ~ 3.6v depends on battery)
- +5v controllable output
- 1 x RS485 Interface
- 1 x UART Interface , 3.3v or 5v
- 1 x Interrupt or Digital IN pins
- 1 x I2C Interface
- 1 x one wire interface
LoRa Spec:
- Frequency Range, Band 1 (HF): 862 ~ 1020 Mhz
- Max +22 dBm constant RF output vs.
- RX sensitivity: down to -139 dBm.
- Excellent blocking immunity
Battery:
- Li/SOCI2 un-chargeable battery
- Capacity: 8500mAh
- Self-Discharge: <1% / Year @ 25°C
- Max continuously current: 130mA
- Max boost current: 2A, 1 second
Power Consumption
- Sleep Mode: 5uA @ 3.3v
- LoRa Transmit Mode: 125mA @ 20dBm, 82mA @ 14dBm
1.3 Features
- LoRaWAN 1.0.3 Class A
- Frequency Bands: CN470/EU433/KR920/US915/EU868/AS923/AU915/IN865/RU864/MA869
- Ultra-low power consumption
- Support multiply RS485 devices by flexible rules
- Support Modbus protocol
- Support Interrupt uplink
- Supports connecting a UART sensors with 3.3V or 5V
- Support Bluetooth v5.1 and LoRaWAN remote configure
- Support wireless OTA update firmware
- AT Commands to change parameters
- Uplink on periodically
- Downlink to change configure
- 8500mAh Li/SOCl2 Battery (RS485-LB)
- Solar panel + 3000mAh Li-ion battery (RS485-LS)
1.4 Applications
- Smart Buildings & Home Automation
- Logistics and Supply Chain Management
- Smart Metering
- Smart Agriculture
- Smart Cities
- Smart Factory
1.5 Sleep mode and working mode
Deep Sleep Mode: Sensor doesn't have any LoRaWAN activate. This mode is used for storage and shipping to save battery life.
Working Mode: In this mode, Sensor will work as LoRaWAN Sensor to Join LoRaWAN network and send out sensor data to server. Between each sampling/tx/rx periodically, sensor will be in IDLE mode), in IDLE mode, sensor has the same power consumption as Deep Sleep mode.
1.6 Button & LEDs

| Behavior on ACT | Function | Action |
|---|---|---|
 1~3s 1~3s | Send an uplink | If sensor is already Joined to LoRaWAN network, sensor will send an uplink packet, blue led will blink once. |
 >3s >3s | Active Device | Green led will fast blink 5 times, device will enter OTA mode for 3 seconds. And then start to JOIN LoRaWAN network. |
 x5 x5 | Deactivate Device | Red led will solid on for 5 seconds. Means device is in Deep Sleep Mode. |
1.7 BLE connection
RS485-LB/LS supports BLE remote configure.
BLE can be used to configure the parameter of sensor or see the console output from sensor. BLE will be only activate on below case:
- Press button to send an uplink
- Press button to active device.
- Device Power on or reset.
If there is no activity connection on BLE in 60 seconds, sensor will shut down BLE module to enter low power mode.
1.8 Pin Definitions
To support external sensors powered by 12V, we have newly added the RS485W-LB model.
RS485W-LB is fully compatible with RS485-LB in firmware and basic functions, except for the added 12V output.
1.8.1 RS485-LB

1.8.2 RS485W-LB

Note: The 12V output is converted from the internal 5V output, so it shares the same control command as the 5V pin, both configured using AT+5VT.
1.8.3 SW2 Jumper (Define UART level to external Sensor)
SW2 defines the voltage level of BOARD_RX and BOARD_TX pins. It should match the external sensor voltage level
1.9 Derivative model: RS485W-LB
RS485W-LB is a derivative product based on RS485-LB, which modifies the motherboard to add 12V output while retaining all original features. This variant is designed for water quality sensors requiring 12V power supply (compatible with sensors mentioned in WQS-LB manual).
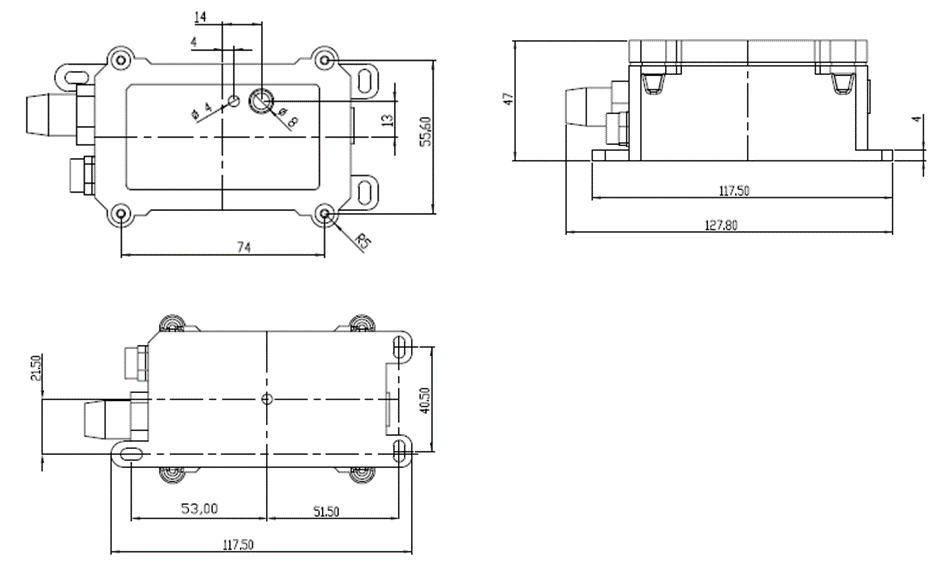
1.10 Mechanical
1.10.1 for LB version
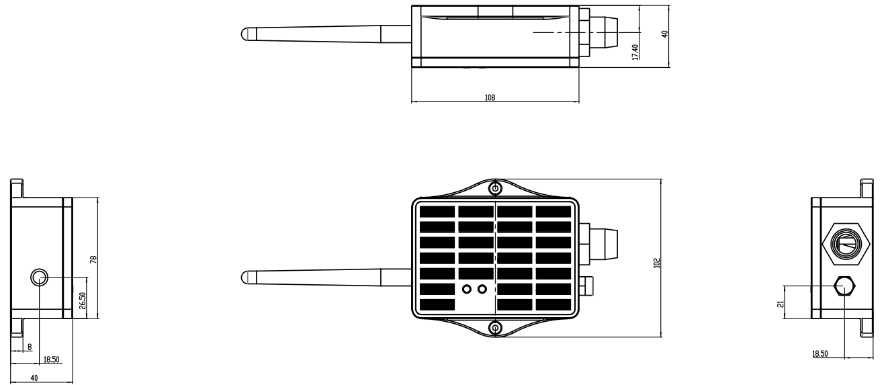
1.10.2 for LS version
2. Operation Mode
2.1 How it works?
The RS485-LB/LS is configured as LoRaWAN OTAA Class A mode by default. It has OTAA keys to join network. To connect a local LoRaWAN network, user just need to input the OTAA keys in the network server and power on the RS485-LB/LS. It will auto join the network via OTAA.
2.2 Quick guide to connect to LoRaWAN server (OTAA)
Following is an example for how to join the TTN v3 LoRaWAN Network. Below is the network structure; we use the LPS8v2 as a LoRaWAN gateway in this example.

The RS485-LB/LS in this example connected to two RS485 devices for demonstration, user can connect to other RS485 devices via the same method.
The LPS8v2 is already set to connected to TTN network , so what we need to now is configure the TTN server.
Step 1: Create a device in TTN with the OTAA keys from RS485-LB/LS.
Each RS485-LB/LS is shipped with a sticker with the default device EUI as below:

You can enter this key in the LoRaWAN Server portal. Below is TTN screen shot:
Create the application.


Add devices to the created Application.


Enter end device specifics manually.

Add DevEUI and AppKey.
Customize a platform ID for the device.
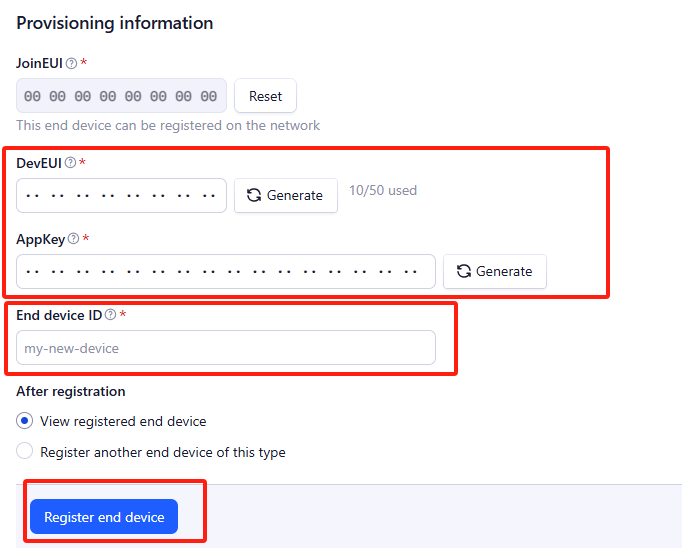
Step 2: Add decoder.
In TTN, user can add a custom payload so it shows friendly reading.
Click this link to get the decoder: https://github.com/dragino/dragino-end-node-decoder/tree/main/
Below is TTN screen shot:


Step 3: Activate on RS485-LB/LS
Press the button for 5 seconds to activate the RS485-LB/LS.
Green led will fast blink 5 times, device will enter OTA mode for 3 seconds. And then start to JOIN LoRaWAN network. Green led will solidly turn on for 5 seconds after joined in network.
After join success, it will start to upload messages to TTN and you can see the messages in the panel.

2.3 Uplink Payload
2.3.1 Device Status, FPORT=5
Users can use the downlink command(0x26 01) to ask RS485-LB to send device configure detail, include device configure status. RS485-LB/LS will uplink a payload via FPort=5 to server.
The Payload format is as below.
Size(bytes) | 1 | 2 | 1 | 1 | 2 |
|---|---|---|---|---|---|
| Value | Sensor Model | Firmware Version | Frequency Band | Sub-band | BAT |
Sensor Model: For RS485-LB/LS, this value is 0x30
Firmware Version: 0x0100, Means: v1.0.0 version
Frequency Band:
0x01: EU868
0x02: US915
0x03: IN865
0x04: AU915
0x05: KZ865
0x06: RU864
0x07: AS923
0x08: AS923-1
0x09: AS923-2
0x0a: AS923-3
0x0b: CN470
0x0c: EU433
0x0d: KR920
0x0e: MA869
Sub-Band:
AU915 and US915:value 0x00 ~ 0x08
CN470: value 0x0B ~ 0x0C
Other Bands: Always 0x00
Battery Info:
Check the battery voltage.
Ex1: 0x0B45 = 2885mV
Ex2: 0x0B49 = 2889mV
2.3.2 Uplink Payload, FPORT=2
| Size(bytes) | 2 | 1 | Length depends on the return from the commands |
| Value | Battery(mV) & Interrupt _Flag | PAYLOAD_VER
| If the valid payload is too long and exceed the maximum support payload length in server, server will show payload not provided in the LoRaWAN server. |
Below is the decoder for the first 3 bytes. The rest bytes are dynamic depends on different RS485 sensors.
Battery(mV)
Check the battery voltage for RS485-LB/LS.
Ex1: 0x0B45 = 2885mV
Ex2: 0x0B49 = 2889mV
Interrupt_Flag
Ex1: 0x0B45>>15&0x01=0x00 : Normal uplink packet.
Ex2: 0x8B49>>15&0x01=0x01 : Interrupt Uplink Packet.
PAYLOAD_VER
RS485-LB/LS can connect to different sensors. User can set the PAYVER_VER field to tell server how to decode the current payload.
2.4 Payload Decoder file
In TTN, use can add a custom payload so it shows friendly reading
In the page Applications --> Payload Formats --> Custom --> decoder to add the decoder from: https://github.com/dragino/dragino-end-node-decoder
2.5 Frequency Plans
The RS485-LB/LS uses OTAA mode and below frequency plans by default. Each frequency band use different firmware, user update the firmware to the corresponding band for their country.
http://wiki.dragino.com/xwiki/bin/view/Main/End%20Device%20Frequency%20Band/
2.6 Configure Device to Read RS485 Sensors
There are plenty of RS485 and TTL level devices in the market and each device has different commands to read the valid data. To support these devices in most flexible, RS485-LB/LS supports flexible command set. User can use Dragino RS485 Tool, AT Commands or LoRaWAN Downlink Command to configure how RS485-LB/LS should read the sensor and how to handle the return from RS485 or TTL sensors.
2.6.1 Method 1 -- via RS485 Configure Tool
Use the RS485 Configure tool is the recommand method. Please see the instruction of how to use the tool:

2.6.2 Method 2 -- via AT Commands
2.6.2.1 Configure UART settings for RS485 or TTL communication
RS485-LB/LS can connect to either RS485 sensors or TTL sensor. User need to specify what type of sensor need to connect.
1. RS485-MODBUS mode:
AT+MOD=1 // Support RS485-MODBUS type sensors. User can connect multiply RS485 , Modbus sensors to the A / B pins.
2. TTL mode:
AT+MOD=2 // Support TTL Level sensors, User can connect one TTL Sensor to the BOARD_TX, BOARD_RX, GND pins. The power supply of the sensor needs to consider the actual voltage and working current to choose the RS485 LB motherboard power supply or external power supply. Refer to Section 6.6.
RS485-LB/LS default UART settings is 9600, no parity, stop bit 1,data bit 8. If the sensor has a different settings, user can change the RS485-LB/LS setting to match.
AT Commands | Description | Example |
|---|---|---|
AT+BAUDR | Set the baud rate. | AT+BAUDR=9600 Options: (1200,2400,4800,14400,19200,115200) |
AT+PARITY | Set UART parity. Default Value is: no parity. | AT+PARITY=0 Option: 0: no parity, 1: odd parity, 2: even parity |
AT+STOPBIT | Set serial stopbit Default Value is: 1bit. | AT+STOPBIT=1 for 1 bit AT+STOPBIT=2 for 2 bits |
| AT+DATABIT | Set serial databit. Default Value is: 8bits. | AT+DATABIT=7 for 7 bits AT+DATABIT=8 for 8 bits |
Example (Soil three-parameter detector):
Wiring the UART sensor
GND <--------> GND
TX <--------> RX
RX <--------> TX
VCC <--------> 3.3/5V

Set the correct configuration:
AT+BAUDR=9600
AT+PARITY=0
AT+STOPBIT=1
AT+DATABIT=8
If the sensor needs 5v. Need to move the switch position to 5v and then use the command AT+5VT=30000
Configuration read command:
AT+CFGDEV=FE 03 00 00 00 03 11 C4,0
FE: Station address
03: Function code
00 00:Register start address
00 03:Number of registers
11 04: Check code

Use AT+COMMAND1 to set it as a command, and use AT+DATACUT1 to intercept the bytes I need

upload payload:

2.6.2.2 Configure sensors
Some sensors might need to configure before normal operation. User can configure such sensor via PC or through RS485-LB/LS AT Commands AT+CFGDEV.
When user issue an AT+CFGDEV command, Each AT+CFGDEV equals to send a command to the RS485 or TTL sensors. This command will only run when user input it and won't run during each sampling.
| AT Commands | Description | Example |
|---|---|---|
| AT+CFGDEV | This command is used to configure the RS485/TTL devices; they won’t be used during sampling. AT+CFGDEV=xx xx xx xx xx xx xx xx xx xx xx xx, mm: 0: no CRC, 1: add CRC-16/MODBUS in the end of this command | AT+CFGDEV=xx xx xx xx xx xx xx xx xx xx xx xx,m |
Detail of AT+CFGDEV command see AT+CFGDEV detail.
2.6.2.3 Configure read commands for each sampling
RS485-LB/LS is a battery powered device; it will sleep most of time. And wake up on each period and read RS485 / TTL sensor data and uplink.
During each sampling, we need to confirm what commands we need to send to the sensors to read data. After the RS485/TTL sensors send back the value, it normally includes some bytes and we only need a few from them for a shorten payload.
To save the LoRaWAN network bandwidth, we might need to read data from different sensors and combine their valid value into a short payload.
This section describes how to achieve above goals.
During each sampling, the RS485-LB/LS can support 15 commands to read sensors. And combine the return to one or several uplink payloads.
Command from RS485-LB/LS to Sensor:
RS485-LB/LS can send out pre-set max 15 strings via AT+COMMAD1, ATCOMMAND2,…, to AT+COMMANDF . All commands are of same grammar.
Handle return from sensors to RS485-LB/LS:
After RS485-LB/LS send out a string to sensor, RS485-LB/LS will wait for the return from RS485 or TTL sensor. And user can specify how to handle the return, by AT+DATACUT or AT+SEARCH commands
AT+DATACUT
When the return value from sensor have fix length and we know which position the valid value we should get, we can use AT+DATACUT command.
AT+SEARCH
When the return value from sensor is dynamic length and we are not sure which bytes the valid data is, instead, we know what value the valid value following. We can use AT+SEARCH to search the valid value in the return string.
Define wait timeout:
Some RS485 device might has longer delay on reply, so user can use AT+CMDDL to set the timeout for getting reply after the RS485 command is sent. For example, AT+CMDDL1=1000 to send the open time to 1000ms
After we got the valid value from each RS485 commands, we need to combine them together with the command AT+DATAUP.
Examples:
Below are examples for the how above AT Commands works.
AT+COMMANDx : This command will be sent to RS485/TTL devices during each sampling, Max command length is 14 bytes. The grammar is:
AT+COMMANDx=xx xx xx xx xx xx xx xx xx xx xx xx,m xx xx xx xx xx xx xx xx xx xx xx xx: The RS485 command to be sent m: 0: no CRC, 1: add CRC-16/MODBUS in the end of this command |
For example, if we have a RS485 sensor. The command to get sensor value is: 01 03 0B B8 00 02 46 0A. Where 01 03 0B B8 00 02 is the Modbus command to read the register 0B B8 where stored the sensor value. The 46 0A is the CRC-16/MODBUS which calculate manually.
In the RS485-LB/LS, we should use this command AT+COMMAND1=01 03 0B B8 00 02,1 for the same.
If a single command exceeds 14 bytes, you can use the command splicing function.
When AT+CMDDLx=1, the commands of AT+COMMANDx and AT+COMMAND(x+1) will be merged.
Examples: To send 00 01 02 03 04 05 06 07 08 09 0A 0B 0C 0D 0E 0F data it should be configured:
AT+COMMAND1=00 01 02 03 04 05 06 07 08 09 0A 0B 0C 0D,0
AT+COMMAND1=1
AT+COMMAND2=0E 0F,0
AT+SEARCHx: This command defines how to handle the return from AT+COMMANDx.
AT+SEARCHx=aa,xx xx xx xx xx
|
Examples:
1)For a return string from AT+COMMAND1: 16 0c 1e 56 34 2e 30 58 5f 36 41 30 31 00 49
If we set AT+SEARCH1=1,1E 56 34. (max 5 bytes for prefix)
The valid data will be all bytes after 1E 56 34 , so it is 2e 30 58 5f 36 41 30 31 00 49

2)For a return string from AT+COMMAND1: 16 0c 1e 56 34 2e 30 58 5f 36 41 30 31 00 49
If we set AT+SEARCH1=2, 1E 56 34+31 00 49
Device will search the bytes between 1E 56 34 and 31 00 49. So it is 2e 30 58 5f 36 41 30

AT+DATACUTx : This command defines how to handle the return from AT+COMMANDx, max return length is 100 bytes.
AT+DATACUTx=a,b,c
|
Examples:
Grab bytes:

Grab a section.

Grab different sections.

Note:
AT+SEARCHx and AT+DATACUTx can be used together, if both commands are set, RS485-LB/LS will first process AT+SEARCHx on the return string and get a temporary string, and then process AT+DATACUTx on this temporary string to get the final payload. In this case, AT+DATACUTx need to set to format AT+DATACUTx=0,xx,xx where the return bytes set to 0.
Example:
AT+COMMAND1=11 01 1E D0,0
AT+SEARCH1=1,1E 56 34
AT+DATACUT1=0,2,1~5
Return string from AT+COMMAND1: 16 0c 1e 56 34 2e 30 58 5f 36 41 30 31 00 49
String after SEARCH command: 2e 30 58 5f 36 41 30 31 00 49
Valid payload after DataCUT command: 2e 30 58 5f 36

2.6.2.4 Compose the uplink payload
Through AT+COMMANDx and AT+DATACUTx we got valid value from each RS485 commands, Assume these valid value are RETURN1, RETURN2, .., to RETURNx. The next step is how to compose the LoRa Uplink Payload by these RETURNs. The command is AT+DATAUP.
Examples: AT+DATAUP=0
Compose the uplink payload with value returns in sequence and send with A SIGNLE UPLINK.
Final Payload is
Battery Info+PAYVER + VALID Value from RETURN1 + Valid Value from RETURN2 + … + RETURNx
Where PAYVER is defined by AT+PAYVER, below is an example screen shot.

Examples: AT+DATAUP=1
Compose the uplink payload with value returns in sequence and send with Multiply UPLINKs.
Final Payload is
Battery Info+PAYVER + PAYLOAD COUNT + PAYLOAD# + DATA
Battery Info (2 bytes): Battery voltage
PAYVER (1 byte): Defined by AT+PAYVER
PAYLOAD COUNT (1 byte): Total how many uplinks of this sampling.
PAYLOAD# (1 byte): Number of this uplink. (from 0,1,2,3…,to PAYLOAD COUNT)
DATA: Valid value: max 6 bytes(US915 version here, Notice*!) for each uplink so each uplink <= 11 bytes. For the last uplink, DATA will might less than 6 bytes

So totally there will be 3 uplinks for this sampling, each uplink includes 6 bytes DATA
DATA1=RETURN1 Valid Value = 20 20 0a 33 90 41
DATA2=1st ~ 6th byte of Valid value of RETURN10= 02 aa 05 81 0a 20
DATA3=7th ~ 11th bytes of Valid value of RETURN10 = 20 20 20 2d 30
Below are the uplink payloads:

Notice: the Max bytes is according to the max support bytes in different Frequency Bands for lowest SF. As below:
* For AU915/AS923 bands, if UplinkDwell time=0, max 51 bytes for each uplink ( so 51 -5 = 46 max valid date)
* For AU915/AS923 bands, if UplinkDwell time=1, max 11 bytes for each uplink ( so 11 -5 = 6 max valid date).
* For US915 band, max 11 bytes for each uplink ( so 11 -5 = 6 max valid date).
* For all other bands: max 51 bytes for each uplink ( so 51 -5 = 46 max valid date).
* When AT+DATAUP=1, the maximum number of segments is 15, and the maximum total number of bytes is 1500;
When AT+DATAUP=1 and AT+ADR=0, the maximum number of bytes of each payload is determined by the DR value. (Since v1.4.0)
If the data is empty, return to the display (Since v1.4.0)
1) When AT+MOD=1, if the data intercepted by AT+DATACUT or AT+MBFUN is empty, it will display NULL, and the payload will be filled with n FFs.

2) When AT+MOD=2, if the data intercepted by AT+DATACUT or AT+MBFUN is empty, it will display NULL, and the payload will be filled with n 00s.

2.6.3 Uplink on demand
Except uplink periodically, RS485-LB/LS is able to uplink on demand. The server sends downlink command to RS485-LB/LS and RS485 will uplink data base on the command.
Downlink control command:
0xA8 command: Send a command to RS485-LB/LS and uplink the output from sensors.
2.6.4 Uplink on Interrupt
Put the interrupt sensor between 3.3v_out and GPIO_EXTI.

AT+INTMOD=0 Disable Interrupt
AT+INTMOD=1 Interrupt trigger by rising or falling edge.
AT+INTMOD=2 Interrupt trigger by falling edge. (Default Value)
AT+INTMOD=3 Interrupt trigger by rising edge.
2.7 Report on Change Feature (Since firmware V1.1.1)
2.7.1 Uplink payload(Enable ROC)
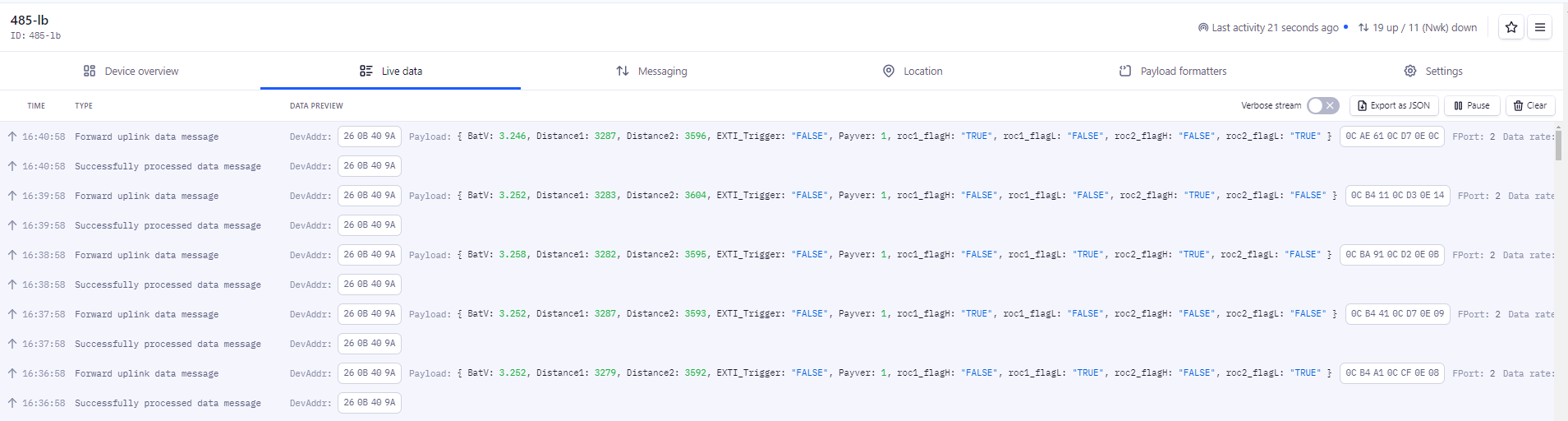
Used to monitor changes in external sensor data. When the change amount exceeds the threshold, the ROC uplink is sent.
Take the ranging sensor of RS485 protocol as an example.
The payload for the uplink is 0C 7E 01 02 2C 07 E0.
Size(bytes) | 2 | 1 | 2 | 2 |
| Value | BAT | Payver & roc1_flagL & roc1_flagH & roc2_flagL & roc1_flagH | Distance1 | Distance2 |
Payver &roc1_flagL & roc1_flagH & roc2_flagL & roc1_flagH:
| Size(bit) | bit7 | bit6 | bit5 | bit4 | bit[3:0] |
| Value | roc1_flagL | roc1_flagH | roc2_flagL | roc2_flagH | Payver |
- roc1_flagL
81 (H): (0x81&0x80)=80(H)=1000 0000(B) bit7=1, "TRUE", When Distance1 is compared with the comparison value after the last ROC refresh, if the reduction exceeds the specified threshold, an ROC uplink is triggered.
41 (H): (0x41&0x80)=0 bit7=0, "FALSE", When Distance1 is compared with the value after the last ROC refresh, the ROC uplink is not triggered if the reduction does not exceed the specified threshold
- roc1_flagH
41 (H): (0x41&0x40)=40(H)=01000 0000(B) bit6=1, "TRUE", When Distance1 is compared with the comparison value after the last ROC refresh, if the increase exceeds the threshold, an ROC uplink is triggered.
81 (H): (0x81&0x40)=0 bit6=0, "FALSE", When Distance1 is compared with the value after the last ROC refresh, the ROC uplink is not triggered if the increase does not exceed the specified threshold.
- roc2_flagL
21 (H): (0x21&0x20)=20(H)=0010 0000(B) bit5=1, "TRUE", When Distance2 is compared with the comparison value after the last ROC refresh, if the reduction exceeds the specified threshold, an ROC uplink is triggered.
11 (H): (0x11&0x20)=0 bit5=0, "FALSE", When Distance2 is compared with the value after the last ROC refresh, the ROC uplink is not triggered if the reduction does not exceed the specified threshold
- roc2_flagH
11 (H): (0x11&0x10)=10(H)=0001 0000(B) bit4=1, "TRUE", When Distance2 is compared with the comparison value after the last ROC refresh, if the increase exceeds the threshold, an ROC uplink is triggered.
21 (H): (0x21&0x10)=0 bit4=0, "FALSE", When Distance2 is compared with the value after the last ROC refresh, the ROC uplink is not triggered if the increase does not exceed the specified threshold.
2.7.2 Set the Report on Change
Feature: Set the detection interval and threshold to monitor whether variables on the uplink payload exceed the threshold. If the value exceeds the threshold, the ROC uplink is sent.
Note : The RS485 payload is flexible and for this device we can monitor the increment on the maximum two segments payload and send the R0C uplink when any segment change is exceeded.
AT Command: AT+ROC
| Command Example | Parameters | Response/Explanation |
|---|---|---|
| AT+ROC=? | Show current ROC setting | 0,0,0,0,0,0,0,0(default) |
AT+ROC=a,b,c,d,e,f,g,h | a: Enable or disable the ROC | 0: off |
| b: Set the detection interval | Unit: second | |
| c: Sets which byte of the upstream payload the first segment of data starts with. | ||
| d: Uplink data type of the sensor. (The customer needs to set it according to the data type indicated in the sensor manual.) | 1: uit16_t(automatically gets two bytes); 2: int16_t(automatically gets two bytes) 3: uint32_t(gets four bytes automatically) 4: int32_t(automatically gets four bytes) | |
| e: Set the change threshold of the data in the first segment. | ||
| f: Sets which byte of the upstream payload the second segment of data starts with. | ||
| g: Uplink data type of the sensor. (The customer needs to set it according to the data type indicated in the sensor manual.) | 1: uit16_t(automatically gets two bytes); 2: int16_t(automatically gets two bytes) 3: uint32_t(gets four bytes automatically) 4: int32_t(automatically gets four bytes) | |
| h: Set the change threshold for the data in the second segment. |
Example:
- AT+ROC=1,60,4,2,2,6,2,2 // Enable the ROC function to detect external sensor data every 60 seconds. When the change value of the fourth to fifth bytes of uplink data exceeds the threshold 2, the uplink of ROC1 is triggered. When the data change of the sixth to seventh bytes exceeds the set threshold 2, the uplink of ROC2 is triggered.
- AT+ROC=1,60,4,2,2,0,0,0 // Enable the ROC function to detect the data of the external sensor every 60 seconds. When the fourth to fifth bytes of uplink data change exceeds the threshold 2, the uplink of ROC1 is triggered. The second segment of data is not monitored.
AT+ROC=1,60,0,0,0,6,2,2 // Enable the ROC function to detect the data of the external sensor every 60 seconds. When the data change of the sixth to seventh bytes of uplink exceeds the threshold 2, the uplink of ROC2 is triggered. The first segment of data is not monitored.
Downlink Command: 0x0D aa bb bb cc dd ee ee ee ee ff gg hh hh hh hh
Format: Function code (0x0D) followed by 15 bytes.
aa: Enable/Disable the ROC.
bb bb: Set the detection interval.
cc: Sets which byte of the upstream payload the first segment of data starts with.
dd: Uplink data type of the sensor. (The customer needs to set it according to the data type indicated in the sensor manual.)
ee ee ee ee: Set the change threshold of the data in the first segment.
ff: Sets which byte of the upstream payload the second segment of data starts with.
gg: Uplink data type of the sensor. (The customer needs to set it according to the data type indicated in the sensor manual.)
hh hh hh hh: Set the change threshold for the data in the second segment.
Example:
- Downlink Payload: 0D 01 00 3C 04 02 00 00 00 02 06 02 00 00 00 02 // Equal to AT+ROC=1,60,4,2,2,6,2,2
- Downlink Payload: 0D 01 00 3C 04 02 00 00 00 02 00 00 00 00 00 00 // Equal to AT+ROC=1,60,4,2,2,0,0,0
- Downlink Payload: 0D 01 00 3C 00 00 00 00 00 00 06 02 00 00 00 02 // Equal to AT+ROC=1,60,0,0,0,6,2,2
Screenshot of parsing example in TTN:
2.8 Datalog Feature(Since v1.3.0)
Datalog Feature is to ensure IoT Server can get all sampling data from Sensor even if the LoRaWAN network is down. For each sampling, RS485-LB/LS will store the reading for future retrieving purposes.
2.8.1 How datalog works
RS485-LB/LS will wait for ACK for every uplink, when there is no LoRaWAN network, RS485-LB/LS will mark these records with non-ack messages and store the sensor data, and it will send all messages (10s interval) after the network recovery.
a) RS485-LB/LS will do an ACK check for data records sending to make sure every data arrive server.
b) RS485-LB/LS will send data in CONFIRMED Mode, but RS485-LB/LS won't re-transmit the packet if it doesn't get ACK, it will just mark it as a NONE-ACK message. In a future uplink if RS485-LB/LS gets a ACK, RS485-LB/LS will consider there is a network connection and resend all NONE-ACK messages.
2.8.2 Enable Datalog
User need to make sure below two settings are enable to use datalog;
- SYNCMOD=1(Default) to enable sync time via LoRaWAN MAC command, click here (AT+SYNCMOD) for detailed instructions.
- PNACKMD=1 to enable datalog feature, click here (AT+PNACKMD) for detailed instructions.
Once RS485-LB/LS Joined LoRaWAN network, it will send the MAC command (DeviceTimeReq) and the server will reply with (DeviceTimeAns) to send the current time to RS485-LB/LS. If RS485-LB/LS fails to get the time from the server, RS485-LB/LS will use the internal time and wait for next time request (AT+SYNCTDC to set the time request period, default is 10 days).
Note: LoRaWAN Server need to support LoRaWAN v1.0.3(MAC v1.0.3) or higher to support this MAC command feature, Chirpstack,TTN V3 v3 and loriot support but TTN V3 v2 doesn't support. If server doesn't support this command, it will through away uplink packet with this command, so user will lose the packet with time request for TTN V3 v2 if SYNCMOD=1.
2.8.3 Unix TimeStamp
RS485-LB uses Unix TimeStamp format based on

User can get this time from link: https://www.epochconverter.com/ :
Below is the converter example

So, we can use AT+TIMESTAMP=1742889625 or downlink 3067E26299 to set the current time 2025 – March -- 25 Tuesday 08:00:25
2.8.4 Poll sensor value
User can poll sensor value based on timestamps from the server. Below is the downlink command.
| 1byte | 4bytes | 4bytes | 1byte |
| 31 | Timestamp start | Timestamp end | Uplink Interval(range 5~255s) |
Timestamp start and Timestamp end use Unix TimeStamp format as mentioned above. Devices will reply with all data log during this time period, use the uplink interval.
For example, downlink command 31 67E24660 67E26280 05
Is to check 2025/03/25 06:00:00 to 2025/03/25 08:00:00's data
Uplink Internal =5s, means RS485-LB will send one packet every 5s.
2.8.5 Datalog Uplink payload
The Datalog poll reply uplink will use below payload format.
Retrieval data payload:
Size(bytes) | 4 | 1 | Length depends on the return from the commands |
|---|---|---|---|
| Value | Unix Time Stamp | Payload Length | Data returned by the sensor |
Example:
If RS485-LB has below data inside Flash:
(Distance sensors using the RS485 protocol are used for testing.)
| Flash Add | Unix Time | Payload Length | BAT voltage | Payload Version | Value |
|---|---|---|---|---|---|
0001 | 2025/3/25 08:09:30 | 5 | 0c a8 | 01 | 08 21 |
| 0002 | 2025/3/25 08:10:30 | 5 | 0c ae | 01 | 08 22 |
| 0003 | 2025/3/25 08:11:30 | 5 | 0c ae | 01 | 08 22 |
| 0004 | 2025/3/25 08:12:30 | 5 | 0c ae | 01 | 08 22 |
| 0005 | 2025/3/25 08:13:30 | 5 | 0c b4 | 01 | 08 23 |
| 0006 | 2025/3/25 08:14:30 | 5 | 0c ae | 01 | 08 22 |
| 0007 | 2025/3/25 08:15:30 | 5 | 0c b4 | 01 | 08 23 |
| 0008 | 2025/3/25 08:16:30 | 5 | 0c ae | 01 | 08 22 |
If user sends below downlink command: 3167E264BA67E2665E05
Where : Start time: 67E264BA = time 2025/3/25 08:09:30
Stop time: 67E2665E= time 2025/3/25 08:16:30
RS485-LB will uplink this payload.
67E264BA 05 0CA8 01 0821 67E264F6050CAE01082267E26532050CAE01082267E2656E050CAE01082267E265AA050CB401082367E265E6050CAE01082267E26622050CB401082367E2665E050CAE010822
Where the first 10 bytes is for the first entry:
67E264BA050CA8010821
Unix Time Stamp: 67E264BA(H)=1742890170(D) --> time=2025-03-25 8:09:30
Payload Length: 0x05(H)=5 bytes
Battery voltage: 0x0CA8(H)=3240 mV
Payload Version: 01
Value: For the distance sensor used for testing, this value is the mm distance value, 0x0821(H)=2081mm.
3. Configure RS485-LB/LS
3.1 Configure Methods
RS485-LB/LS supports below configure method:
- AT Command via Bluetooth Connection (Recommended): BLE Configure Instruction.
- AT Command via UART Connection : See UART Connection.
- LoRaWAN Downlink. Instruction for different platforms: See IoT LoRaWAN Server section.
3.2 General Commands
These commands are to configure:
- General system settings like: uplink interval.
- LoRaWAN protocol & radio related command.
They are same for all Dragino Devices which support DLWS-005 LoRaWAN Stack. These commands can be found on the wiki:
http://wiki.dragino.com/xwiki/bin/view/Main/End%20Device%20AT%20Commands%20and%20Downlink%20Command/
3.3 Commands special design for RS485-LB/LS
These commands only valid for RS485-LB/LS, as below:
3.3.1 Choose Device Type (RS485 or TTL)
RS485-LB/LS can connect to either RS485 sensors or TTL sensor. User need to specify what type of sensor need to connect.
- AT Command
AT+MOD=1 // Set to support RS485-MODBUS type sensors. User can connect multiply RS485 , Modbus sensors to the A / B pins.
AT+MOD=2 // Set to support TTL Level sensors, User can connect one TTL Sensor to the TXD/RXD/GND pins.
- Downlink Payload
0A aa --> same as AT+MOD=aa
3.3.2 RS485 Debug Command (AT+CFGDEV)
This command is used to configure the RS485 or TTL sensors; they won't be used during sampling. Max Length of AT+CFGDEV is 40 bytes.
- AT Command
AT+CFGDEV=xx xx xx xx xx xx xx xx xx xx xx xx,m m: 0: no CRC; 1: add CRC-16/MODBUS in the end of this command.
Downlink Payload
Format: A8 MM NN XX XX XX XX YY
Where:
MM: 1: add CRC-16/MODBUS ; 0: no CRC
NN: The length of RS485 command
XX XX XX XX: RS485 command total NN bytes
YY: How many bytes will be uplink from the return of this RS485 command, if YY=0, RS485-LB/LS will execute the downlink command without uplink; if YY>0, RS485-LB/LS will uplink total YY bytes from the output of this RS485 command
Example 1:
To connect a Modbus Alarm with below commands.
The command to active alarm is: 0A 05 00 04 00 01 4C B0. Where 0A 05 00 04 00 01 is the Modbus command to read the register 00 40 where stored the DI status. The 4C B0 is the CRC-16/MODBUS which calculate manually.
The command to deactivate alarm is: 0A 05 00 04 00 00 8D 70. Where 0A 05 00 04 00 00 is the Modbus command to read the register 00 40 where stored the DI status. The 8D 70 is the CRC-16/MODBUS which calculate manually.
So if user want to use downlink command to control to RS485 Alarm, he can use:
A8 01 06 0A 05 00 04 00 01 00: to activate the RS485 Alarm
A8 01 06 0A 05 00 04 00 00 00: to deactivate the RS485 Alarm
A8 is type code and 01 means add CRC-16/MODBUS at the end, the 3rd byte is 06, means the next 6 bytes are the command to be sent to the RS485 network, the final byte 00 means this command don’t need to acquire output.
Example 2:
Check TTL Sensor return:

3.3.3 Set Payload version
This is the first byte of the uplink payload. RS485-LB/LS can connect to different sensors. User can set the PAYVER field to tell server how to decode the current payload.
- AT Command:
AT+PAYVER: Set PAYVER field = 1
- Downlink Payload:
0xAE 01 --> Set PAYVER field = 0x01
0xAE 0F --> Set PAYVER field = 0x0F
3.3.4 Set RS485 Sampling Commands
AT+COMMANDx, AT+DATACUTx and AT+SEARCHx
These three commands are used to configure how the RS485-LB polling data from Modbus device. Detail of usage please see : polling RS485 device.
AT Command:
AT+COMMANDx: Configure RS485 read command to sensor.
AT+DATACUTx: Configure how to handle return from RS485 devices.
AT+SEARCHx: Configure search command
Downlink Payload:
0xAF downlink command can be used to set AT+COMMANDx or AT+DATACUTx.
Note : if user use AT+COMMANDx to add a new command, he also need to send AT+DATACUTx downlink.
Format: AF MM NN LL XX XX XX XX YY
Where:
MM: the ATCOMMAND or AT+DATACUT to be set. Value from 01 ~ 0F,
NN: 0: no CRC; 1: add CRC-16/MODBUS ; 2: set the AT+DATACUT value.
LL: The length of AT+COMMAND or AT+DATACUT command
XX XX XX XX: AT+COMMAND or AT+DATACUT command
YY: If YY=0, RS485-LB/LS will execute the downlink command without uplink; if YY=1, RS485-LB/LS will execute an uplink after got this command.
Example:
AF 03 01 06 0A 05 00 04 00 01 00: Same as AT+COMMAND3=0A 05 00 04 00 01,1
AF 03 02 06 10 01 05 06 09 0A 00: Same as AT+DATACUT3=16,1,5+6+9+10
AF 03 02 06 0B 02 05 07 08 0A 00: Same as AT+DATACUT3=11,2,5~7+8~10
0xAB downlink command can be used for set AT+SEARCHx
Example: AB aa 01 03 xx xx xx (03 here means there are total 3 bytes after 03) So
AB aa 01 03 xx xx xx same as AT+SEARCHaa=1,xx xx xx
AB aa 02 03 xx xx xx 02 yy yy(03 means there are 3 bytes after 03, they are xx xx xx;02 means there are 2 bytes after 02, they are yy yy) so the commands
AB aa 02 03 xx xx xx 02 yy yy same as AT+SEARCHaa=2,xx xx xx+yy yy
3.3.5 Fast command to handle MODBUS device
AT+MBFUN is valid since v1.3 firmware version. The command is for fast configure to read Modbus devices. It is only valid for the devices which follow the MODBUS-RTU protocol.
This command is valid since v1.3 firmware version
AT+MBFUN has only two value:
AT+MBFUN=1: Enable Modbus reading. And get response base on the MODBUS return
AT+MBFUN=1, device can auto read the Modbus function code: 01, 02, 03 or 04. AT+MBFUN has lower priority vs AT+DATACUT command. If AT+DATACUT command is configured, AT+MBFUN will be ignore.
AT+MBFUN=0: Disable Modbus fast reading.
Example:
AT+MBFUN=1 and AT+DATACUT1/AT+DATACUT2 are not configure (0,0,0).
AT+COMMAND1= 01 03 00 10 00 08,1 --> read slave address 01 , function code 03, start address 00 01, quantity of registers 00 08.
AT+COMMAND2= 01 02 00 40 00 10,1 --> read slave address 01 , function code 02, start address 00 40, quantity of inputs 00 10.


Downlink Commands:
A9 aa --> Same as AT+MBFUN=aa
3.3.6 RS485 command timeout
Some Modbus device has slow action to send replies. This command is used to configure the RS485-BL to use longer time to wait for their action.
Default value: 0, range: 0 ~ 10 seconds
- AT Command:
AT+CMDDLaa=hex(bb cc)
Example:
AT+CMDDL1=1000 to send the open time to 1000ms
Downlink Payload:
0x AA aa bb cc Same as: AT+CMDDLaa=hex(bb cc)
Example:
0xAA 01 03 E8 --> Same as AT+CMDDL1=1000 ms
range: 0 ~ 180seconds (Since version v1.2)
Downlink Payload:
0x AA aa bb cc dd Same as: AT+CMDDLaa=hex(bb cc dd)
Example:
0xAA 02 01 11 70 --> Same as AT+CMDDL2=70000 ms
3.3.7 Uplink payload mode
Define to use one uplink or multiple uplinks for the sampling.
The use of this command please see: Compose Uplink payload
- AT Command:
AT+DATAUP=0
AT+DATAUP=1
AT+DATAUP=2 // The external sensor is sent as a separate packet and the data returned by the AT+COMMAND command is sent as a separate packet.
An asterisk ( * ) indicates that it is optional and can be added, refer to instructions AT+EXT=a,b,c to set up external sensors and pulse counts.
(FPORT2)Battery(mV) & Interrupt_Flag + PAYLOAD_VER + *SHT31 temp + *SHT31 Hum + *counting + *DS18B20
(FPORT3)PAYLOAD COUNT + PAYLOAD# + Length depends on the return from the commands
Note: AT+DATAUP=2 is valid only for firmware versions later than v1.1.0.
Downlink Payload:
0xAD 00 --> Same as AT+DATAUP=0
0xAD 01 --> Same as AT+DATAUP=1 // Each uplink is sent to the server one after the other as it is segmented.
0xAD 02 --> Same as AT+DATAUP=2
- AT Command:
AT+DATAUP=1,Timeout
Downlink Payload:
0xAD 01 00 00 14 --> Same as AT+DATAUP=1,20000 // (00 00 14 is 20 seconds)
Each uplink is sent to the server at 20-second intervals when segmented.
3.3.8 Clear RS485 Command
The AT+COMMANDx and AT+DATACUTx AT+SEARCHx and AT+CMDDLx settings are stored in special location, user can use below command to clear them.
AT Command:
AT+CMDEAR=mm,nn mm: start position of erase ,nn: stop position of erase Etc. AT+CMDEAR=1,10 means erase AT+COMMAND1/AT+DATACUT1/AT+SEARCH1/AT+CMDDL1 to AT+COMMANDA/AT+DATACUTA/AT+SEARCHA/AT+CMDDLA.
Example screen shot after clear all RS485 commands.
The uplink screen shot is:

Downlink Payload:
0x09 aa bb same as AT+CMDEAR=aa,bb
3.3.9 Set Serial Communication Parameters
Set the Rs485 serial communication parameters:
AT Command:
- Set Baud Rate:
AT+BAUDR=9600 // Options: (200~115200),When using low baud rate or receiving multiple bytes, you need to use AT+CMDDL to increase the receive timeout (the default receive timeout is 300ms), otherwise data will be lost.
- Set UART Parity
AT+PARITY=0 // Option: 0: no parity, 1: odd parity, 2: even parity
- Set STOPBIT
AT+STOPBIT=1 // Option:1 for 1 bit ; 2 for 2 bits
- Set DATABIT
AT+DATABIT=8 // Option:7 for 7 bits ; 8 for 8 bits
Downlink Payload:
Example:
A7 01 00 60 same as AT+BAUDR=9600
A7 01 04 80 same as AT+BAUDR=115200
A7 02 aa: Same as AT+PARITY=aa (aa value: 00 , 01 or 02)
A7 03 aa: Same as AT+STOPBIT=aa (aa value: 01 or 02)
A7 04 07: Same as AT+DATABIT=7
A7 04 08: Same as AT+DATABIT=8
3.3.10 Cut data separation processing
AT+NEWLINE command, which only takes effect when AT+DATAUP=1 or AT+DATAUP=1, timeout.
When not set, each part of AT+DATAUP is sent according to the maximum number of bytes of DR.
When setting, each part of AT+DATAUP is sent according to the value set by AT+NEWLINE.
AT Command:
AT+NEWLINE=ALL The data cut out by each AT+COMMANDx command is sent separately as an uplink.
AT+NEWLINE=ALL equal: AT+NEWLINE=1+2+3+4+5+6+7+8+9+10+11+12+13+14+15
AT+NEWLINE=a+b+c The data returned by all commands is divided into three parts, COMMAND(1~a) is the first part, COMMAND(a+1~b) is the second part,COMMAND(b+1~c) is the third part.
AT+NEWLINE=NULL Turn off the functionality of this AT command.
Downlink Payload:
AT+NEWLINE=ALL ---> 0xA5 01
AT+NEWLINE= NULL ---> 0xA5 00
AT+NEWLINE= a+b+c ---> 0xA5 number of bytes a b c
AT+NEWLINE= 1+5+15 ---> 0xA5 03 01 05 0F
3.3.11 Control output power duration
Before v1.2, the maximum settable time of 3V3T and 5VT is 65535 milliseconds. Since v1.2, the maximum settable time of 3V3T and 5VT is 180 seconds.
User can set the output power duration before each sampling.
AT Command:
Example:
AT+3V3T=1000 // 3V3 output power will open 1s before each sampling.
AT+5VT=1000 // +5V output power will open 1s before each sampling.
LoRaWAN Downlink Command:
Example:
When the delay is less than 65 seconds, Downlink can be controlled by 4 bytes or 5 bytes:
07 01 aa bb Same as AT+5VT=(aa<<8 | bb)
07 02 aa bb Same as AT+3V3T=(aa<<8 | bb)
07 01 aa bb cc Same as AT+5VT=(aa<<16 | bb<<8 | cc)
07 02 aa bb cc Same as AT+3V3T=(aa<<16 | bb<<8 | cc)
When the delay is greater than 65 seconds, the Downlink is controlled by 5 bytes:
07 01 aa bb cc Same as AT+5VT=(aa<<16 | bb<<8 | cc)
07 02 aa bb cc Same as AT+3V3T=(aa<<16 | bb<<8 | cc)
When setting 3V3T, 5VT normally open or normally closed.
07 03 01 Same as AT+3V3T=0 (Enable 3.3V Output)
07 03 00 Same as AT+3V3T=65535 (Disable 3.3V Output)
07 04 01 Same as AT+5VT=65535 (Enable 5V Output)
07 04 00 Same as AT+5VT=0 (Disable 5V Output)
3.3.12 Encrypted payload
AT Command:
AT+DECRYPT=1 // The payload is uploaded without encryption
AT+DECRYPT=0 // Encrypt when uploading payload (default)
3.3.13 Get sensor value
AT Command:
AT+GETSENSORVALUE=0 // The serial port gets the reading of the current sensor
AT+GETSENSORVALUE=1 // The serial port gets the current sensor reading and uploads it.
3.3.14 Resets the downlink packet count
AT Command:
AT+DISFCNTCHECK=0 // When the downlink packet count sent by the server is less than the node downlink packet count or exceeds 16384, the node will no longer receive downlink packets (default)
AT+DISFCNTCHECK=1 // When the downlink packet count sent by the server is less than the node downlink packet count or exceeds 16384, the node resets the downlink packet count and keeps it consistent with the server downlink packet count.
3.3.15 When the limit bytes are exceeded, upload in batches
AT Command:
AT+DISMACANS=0 // When the MACANS of the reply server plus the payload exceeds the maximum number of bytes of 11 bytes (DR0 of US915, DR2 of AS923, DR2 of AU195), the node will send a packet with a payload of 00 and a port of 4. (default)
AT+DISMACANS=1 // When the MACANS of the reply server plus the payload exceeds the maximum number of bytes of the DR, the node will ignore the MACANS and not reply, and only upload the payload part.
Downlink Payload
0x21 00 01 // Set the DISMACANS=1
3.3.16 Copy downlink to uplink
AT Command:
AT+RPL=5 // After receiving the package from the server, it will immediately upload the content of the package to the server, the port number is 100.
Example:aa xx xx xx xx // aa indicates whether the configuration has changed, 00 is yes, 01 is no; xx xx xx xx are the bytes sent.

For example, sending 11 22 33 44 55 66 77 will return invalid configuration 00 11 22 33 44 55 66 77.

For example, if 01 00 02 58 is issued, a valid configuration of 01 01 00 02 58 will be returned.
3.3.17 Query version number and frequency band
Downlink Payload: 26 01 // Downlink 26 01 can query device upload frequency, frequency band, software version number, battery.
Example:

3.4 +3V3 Output
RS485-LB/LS has a Controllable +3V3 output, user can use this output to power external sensor.
The +3V3 output will be valid for every sampling. RS485-LB/LS will enable +3V3 output before all sampling and disable the +3V3 after all sampling.
The +3V3 output time can be controlled by AT Command.
Note: (Since v1.2, AT+3V3T increased from the maximum 65000ms to 180000ms )
AT+3V3T=1000
Means set +3v3 valid time to have 1000ms. So, the real +3v3 output will actually have 1000ms + sampling time for other sensors.
By default, the AT+3V3T=0. This is a special case, means the +3V3 output is always on at any time
3.5 +5V Output
RS485-LB/LS has a Controllable +5V output, user can use this output to power external sensor.
The +5V output will be valid for every sampling. RS485-LB/LS will enable +5V output before all sampling and disable the +5v after all sampling.
The 5V output time can be controlled by AT Command.
Note: (Since v1.2, AT+5VT increased from the maximum 65000ms to 180000ms )
AT+5VT=1000
Means set 5V valid time to have 1000ms. So, the real 5V output will actually have 1000ms + sampling time for other sensors.
By default, the AT+5VT=0. If the external sensor which require 5v and require more time to get stable state, user can use this command to increase the power ON duration for this sensor.
3.6 Switch Jumper
| Switch Jumper | Feature |
|---|---|
| SW1 | ISP position: Upgrade firmware via UART Flash position: Configure device, check running status. |
| SW2 | 5V position: set to compatible with 5v I/O. 3.3v position: set to compatible with 3.3v I/O., |
+3.3V: is always ON
+5V: Only open before every sampling. The time is by default, it is AT+5VT=0.
Note: If SW2 is at +5V and AT+5VT=0, work mode 2 will not be able to send data.
3.7 Connect to external temperature sensor & counting sensor(Since firmware V1.1.0)
Setting up external sensors:
- AT Command:
AT+EXT=a,b,c
a: 0: ignore I2C interface. 1: Add SHT31 sensor support (4 bytes).
b: 0: ignore pulse interface ( doesn't effect interrupt ). 1: Add Counting Support (4 bytes).
c: 0: ignore one wire interface. 1: Add DS18B20 support (2 bytes).
Example:
AT+EXT=1,1,1
Device will add SHT31, counting, DS18B20 support.
The payload will be:
Battery(mV) & Interrupt _Flag + PAYLOAD_VER + *SHT31 temp + *SHT31 Hum + *counting + *DS18B20 + Length depends on the return from the commands
AT+EXT=0,1,0
Device will add counting support.
The payload will be:
Battery(mV) & Interrupt _Flag + PAYLOAD_VER + *counting + Length depends on the return from the commands
- Downlink Command: 0x0B aa bb cc
Format: Command Code (0x0B) followed by 3 bytes.
aa: Set whether to add SHT31 sensor support. 00: No, 01: Add.
bb: Set whether to add Counting Support. 00: No, 01: Add.
cc: Set whether to add DS18B20 support. 00: No, 01: Add.
Example:
Downlink payload: 0B 00 00 01 //AT+EXT=0,0,1 Add DS18B20 support
Downlink payload: 0B 01 00 01 //AT+EXT=1,0,1 Add SHT31 sensor support and DS18B20 support
Set the pulse count value:
- AT Command:
AT+SETCNT=aa // Set the pulse count value.
Example:
AT+SETCNT=100 // Set the pulse count to 100.
- Downlink Command: 0x0C
Format: Command Code (0x0C) followed by 4 bytes.
Example:
Downlink Payload: 0C 00 00 00 64 // AT+SETCNT=100
Connect DS18B20 sensor:
RED <---------> VBAT_OUT(+3.3V)
YELLOW <----> ONE_WIRE
BLACK <------> GND

Connect SHT31 sensor:
RED <---------> VBAT_OUT(+3.3V)
YELLOW <----> SCL
GREEN <------> SDA
BLACK <------> GND

Connect counting sensor:
The counting sensor cables are connected to the VBAT_OUT(+3.3v) pin and GPIO_EXTI pin of the RS485_LB motherboard.

3.8 Set time synchronization interval
Feature: Get or set time synchronization interval in day or hour.
AT Command: AT+SYNCTDC
| Command Example | Function | Response/Parameter |
|---|---|---|
AT+SYNCTDC=? | Gets the current time synchronization interval | 12,1 (Default) OK |
AT+SYNCTDC=aa,bb | aa: Set the interval for automatic synchronization | Range: 0~255 |
| bb: Set the unit of the time synchronization interval | 0: Unit: day 1: Unit: hour |
Downlink Command: 0x29
Format: Command Code (0x29) followed by 3 bytes.
- Example 1: Downlink Payload: 29 0C 00 // Calibrate once every 12 days
- Example 2: Downlink Payload: 29 0C 01 // Calibrate once every 12 hours
3.9 Battery & Power Consumption
RS485-LB use ER26500 + SPC1520 battery pack and RS485-LS use 3000mAh Recharable Battery with Solar Panel. See below link for detail information about the battery info and how to replace.
Battery Info & Power Consumption Analyze .
4. Case Study
User can check this URL for some case studies: APP RS485 COMMUNICATE WITH SENSORS
5. OTA Firmware update
User can change firmware RS485-LB/LS to:
- Change Frequency band/ region.
- Update with new features.
- Fix bugs.
Firmware and changelog can be downloaded from : Firmware download link
Methods to Update Firmware:
- (Recommanded way) OTA firmware update via wireless: http://wiki.dragino.com/xwiki/bin/view/Main/Firmware%20OTA%20Update%20for%20Sensors/
- Update through UART TTL interface: Instruction.
6. FAQ
6.1 How to change the LoRa Frequency Bands/Region?
User can follow the introduction for how to upgrade firmware. When download the firmware, choose the required image file for download.
6.2 How many RS485-Slave can RS485-LB/LS connects?
The RS485-LB/LS can support max 32 RS485 devices. Each uplink command of RS485-LB/LS can support max 15 different RS485 command. So RS485-LB/LS can support max 15 RS485 devices pre-program in the device for uplink. For other devices no pre-program, user can use the downlink message (type code 0xA8) to poll their info.
6.3 How to Use RS485-LB/LS to connect to RS232 devices?
Use RS485-LB/LS or RS485-LN to connect to RS232 devices. - DRAGINO
6.4 How to judge whether there is a problem with the set COMMAND
6.4.1 Introduce:
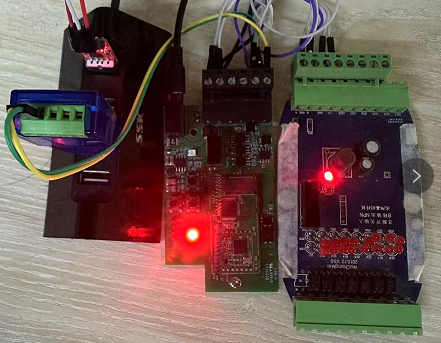
Users can use below the structure to fast debug the communication between RS485-LB/LS and RS485-LN. The principle is to put the PC in the RS485 network and sniff the packet between Modbus MTU and RS485-LB/LS/LN. We can use this way to:
- Test if Modbus-MTU works with PC commands.
- Check if RS485-LN sent the expected command to Mobus-MTU
- Check if Modbus-MTU return back the expected result to RS485-LN.
- If both b) and c) has issue, we can compare PC's output and RS485-LN output.

Example Connection:
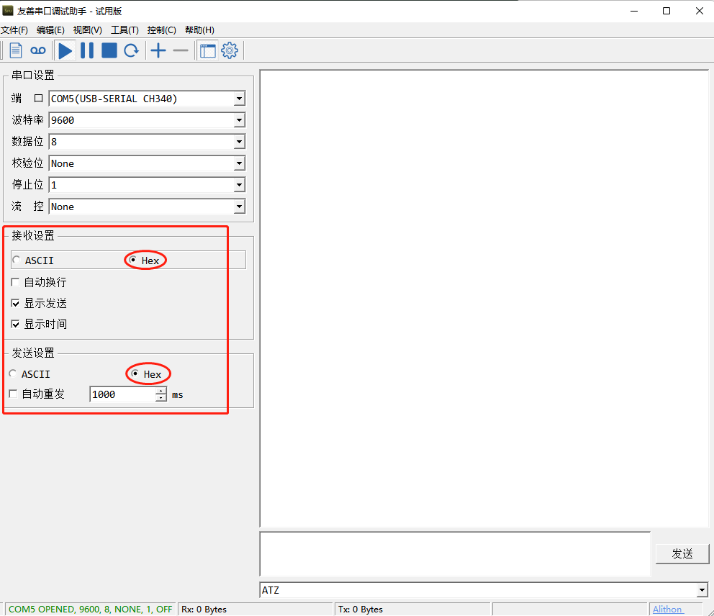
6.4.2 Set up PC to monitor RS485 network With Serial tool
Note: Receive and send set to hex mode
6.4.3 With ModRSsim2:
(1) Select serial port MODBUS RS-232
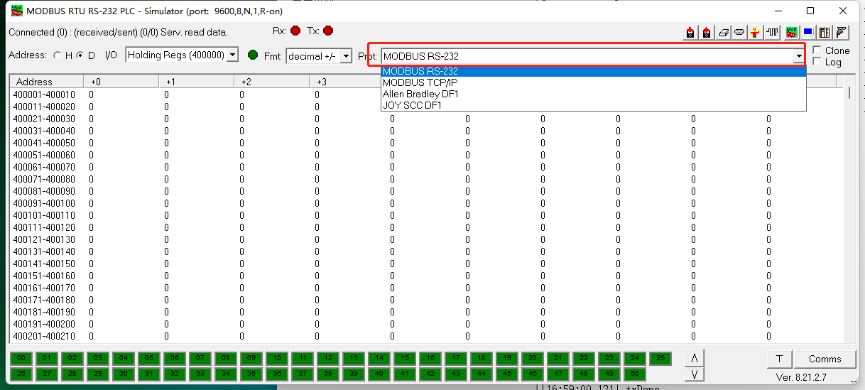
(2) Click the serial port icon
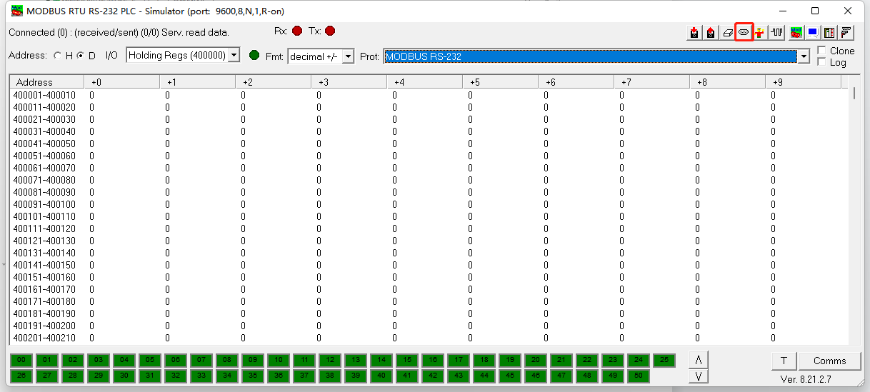
(3) After selecting the correct serial port and baud rate, click ok
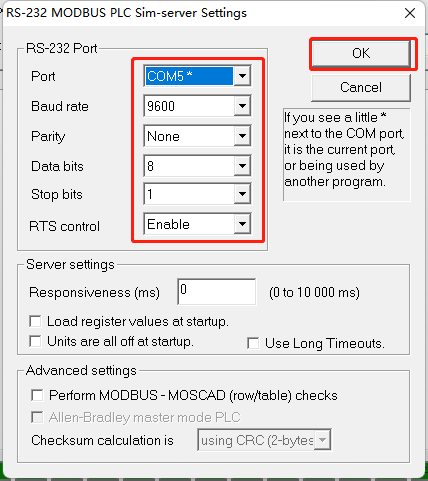
(4) Click the comms.
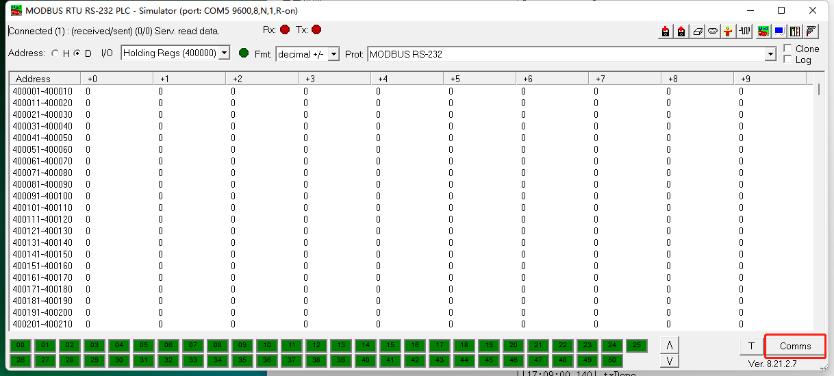
Run RS485-LN/BL command and monitor if it is correct.
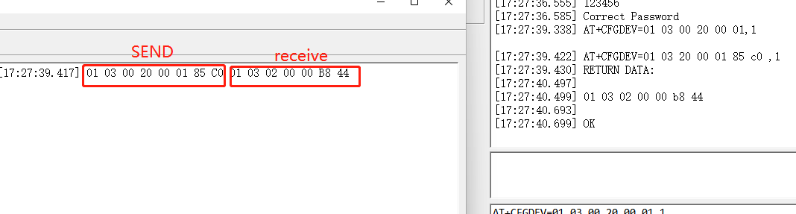
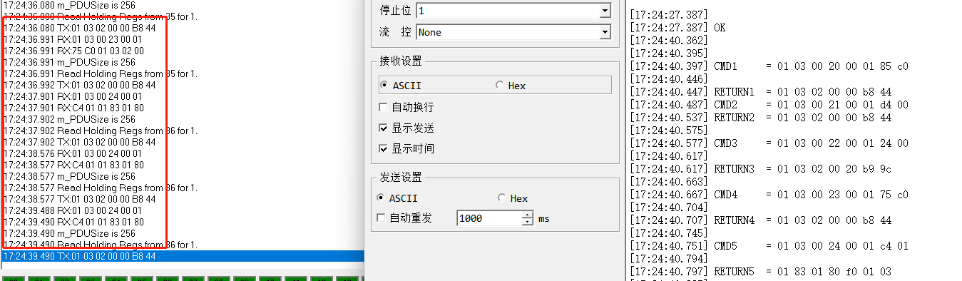
6.4.4 Example – Test the CFGDEV command
RS485-LN sent below command:
AT+CFGDEV=01 03 20 00 01 85 c0,1 to RS485 network, and PC is able to get this command and return commands from MTU to show in the serial tool.
We can see the output from the Serial port tool to analyze. And check if they are expected result.
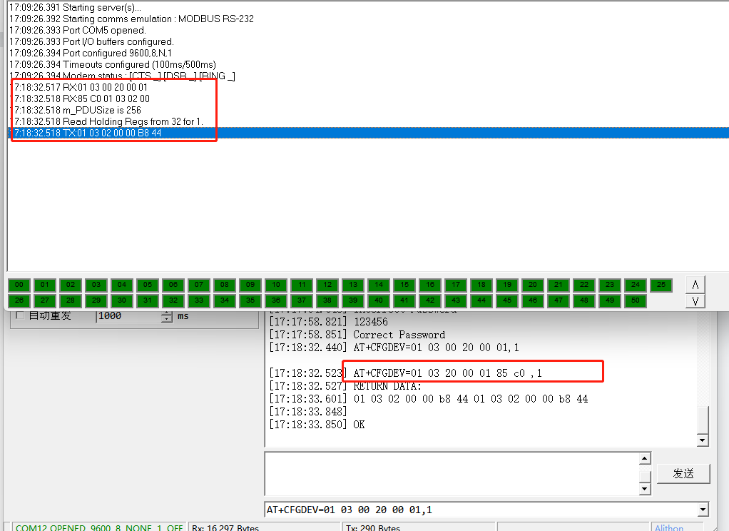
We can also use ModRSsim2 to see the output.
6.4.5 Example – Test CMD command sets.
Run AT+GETSENSORVALUE=1 to test the CMD commands set in RS485-LB.
Serial port tool:
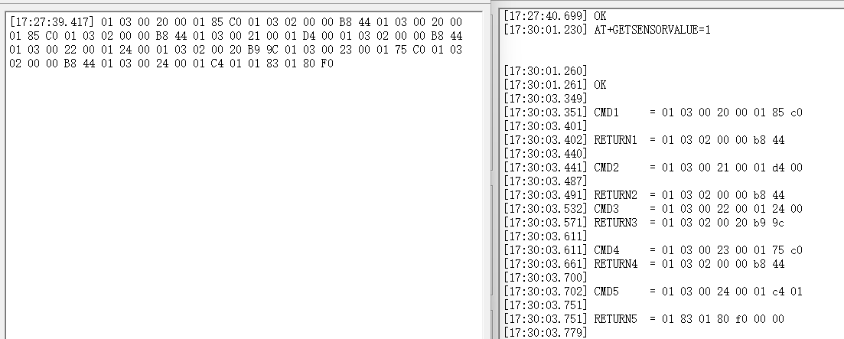
ModRSsim2:
6.4.6 Test with PC
If there is still have problem to set up correctly the commands between RS485-LN and MTU. User can test the correct RS485 command set in PC and compare with the RS485 command sent out via RS485-LN. as long as both commands are the same, the MTU should return correct result.
Or User can send the working commands set in PC serial tool to Dragino Support to check what should be configured in RS485-LN.
Connection method:
Link situation:


6.5 Where to get the decoder for RS485-LB/LS?
The decoder for RS485-LB/LS needs to be written by yourself. Because the sensor to which the user is connected is custom, the read device data bytes also need custom parsing, so there is no universal decoder. We can only provide templates for decoders (no intermediate data parsing part involved)
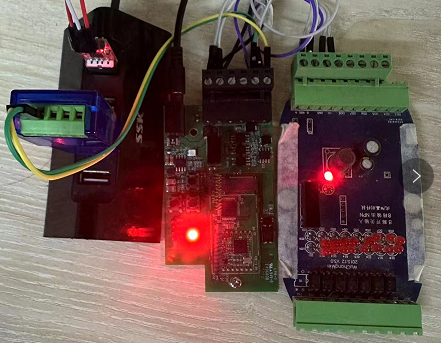
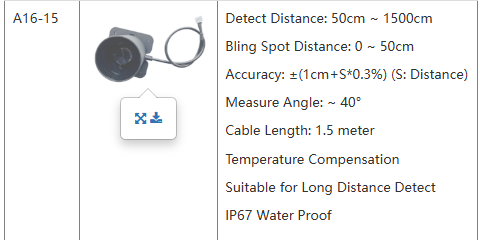
6.6 How to connect RS485-LB node to UART distance sensor?
Take the A16-15 as an example, but the same setup can support different distance sensors, compare specifications see this link to DDS04-LB.
Connection:

- AT command configuration:
AT+MOD=2
AT+COMMAND1=01 02 03 04 05 ,0 AT+SEARCH1=1,ff AT+DATACUT1=4,2,2~3 AT+CMDDL1=1000
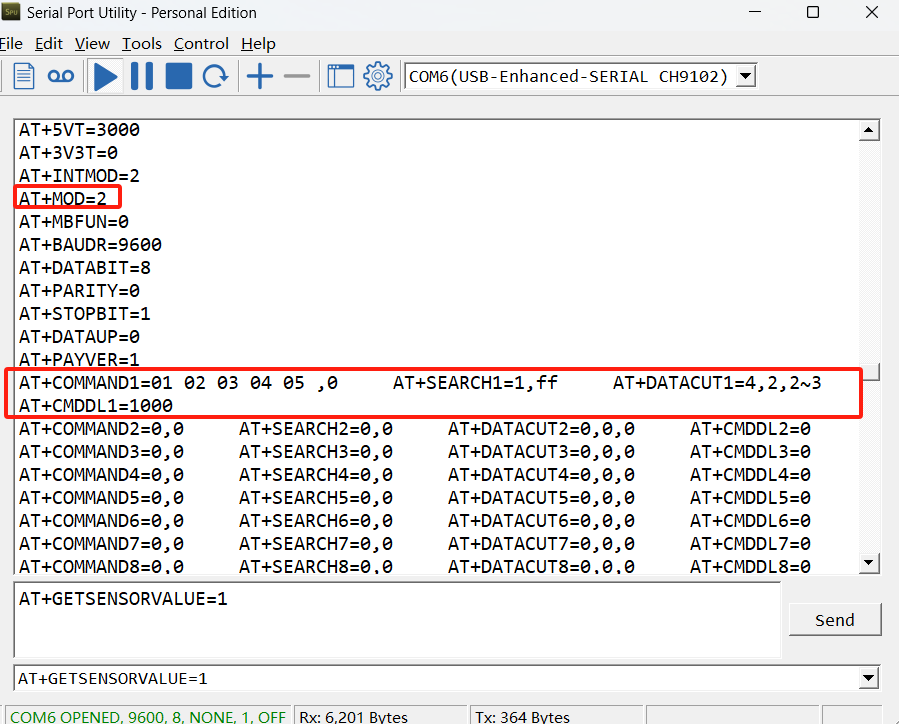
- Decoder: Decoding refer to this link.
- Example in TTN:

6.7 How to determine whether the returned data value FF is valid data or invalid data?
The address of the returned data can be used as a flag.
The customer uses the intercept command to intercept the first bit of the returned data (the slave address of the sensor) as a judgment flag.
Invalid data:
If the first bit and the data are both FF, it means the data is empty.
Valid data:
If the first bit is a normal slave address and the data is FF, it means the data is normal.
7. Trouble Shooting
7.1 Downlink doesn't work, how to solve it?
Please see this link for debug: LoRaWAN Communication Debug
7.2 Why I can't join TTN V3 in US915 /AU915 bands?
It might about the channels mapping. Please see for detail: Notice of Frequency band
7.3 Possible reasons why the device is unresponsive:
1. Check whether the battery voltage is lower than 2.8V
2. Check whether the jumper of the device is correctly connected

3. Check whether the switch here of the device is at the ISP(The switch can operate normally only when it is in RUN)

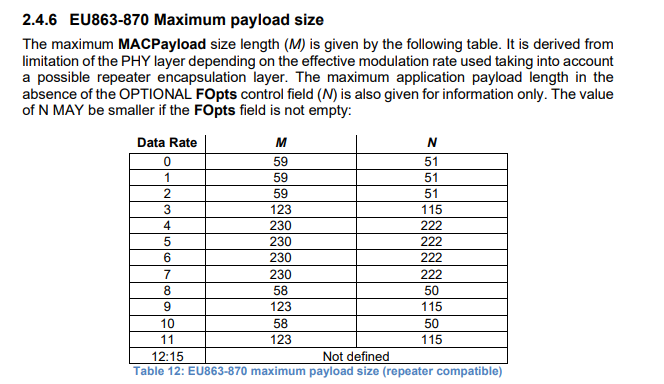
7.4 Why can't customers see the device's data in the server when the data is too long?
This is due to the limitation of the lorawan protocol, and the fixed DR needs to be adjusted to improve this problem.
Please refer to the following link for the number of bytes limited by different frequencies and different DRs in the lorawan protocol
lora-alliance.org/wp-content/uploads/2021/05/RP002-1.0.3-FINAL-1.pdf
Example:
Please refer to the following command to fix DR
AT+ADR=0
AT+DR=3
Downlink command:
7.5 How to solve the problem that the sensor requires a pull-up resistor on the RS485A pin?
1. Upgrade the firmware to a dedicated firmware, which will consume more power and cannot enter low power mode.
If necessary, please contact our technical support email: support@dragino.com
2. Use AT command: AT+RS485POWER=1
8. Order Info
Part Number: RS485-LB-XX-YY / RS485-LS-XX-YY /RS485W-LB-XX-YY/RS485W-LS-XX-YY
XX:
- EU433: frequency bands EU433
- EU868: frequency bands EU868
- KR920: frequency bands KR920
- CN470: frequency bands CN470
- AS923: frequency bands AS923
- AU915: frequency bands AU915
- US915: frequency bands US915
- IN865: frequency bands IN865
- RU864: frequency bands RU864
- KZ865: frequency bands KZ865
YY: Hole Option
12: With M12 waterproof cable hole
16: With M16 waterproof cable hole
9. Packing Info
Package Includes:
RS485-LB x 1/ RS485-LS x 1/RS485W-LB x 1/RS485W-LS x 1
Stick Antenna for LoRa RF part x 1
Program cable x 1
Dimension and weight:
Package Size / pcs :
- For RS485-LB: 145*80*50 mm
- For RS485-LS: 145*110*50 mm
Weight / pcs :
- For RS485-LB: 225 g
- For RS485-LS: 285 g
10. Support
Support is provided Monday to Friday, from 09:00 to 18:00 GMT+8. Due to different timezones we cannot offer live support. However, your questions will be answered as soon as possible in the before-mentioned schedule.
Provide as much information as possible regarding your enquiry (product models, accurately describe your problem and steps to replicate it etc) and send a mail to support@dragino.com